Sfoglia categorie
Esplora
Fiverr Pro
Italiano
$
USD





Traduzione automatica.
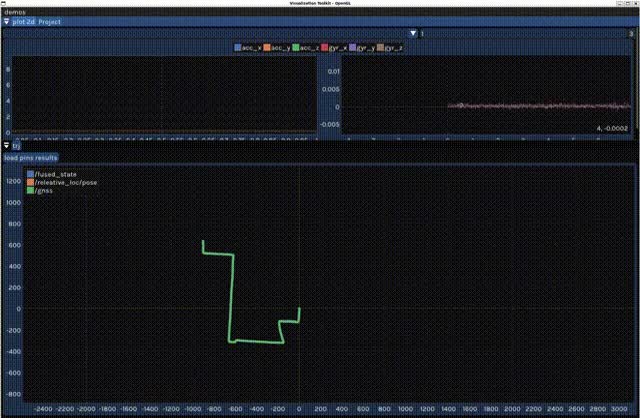
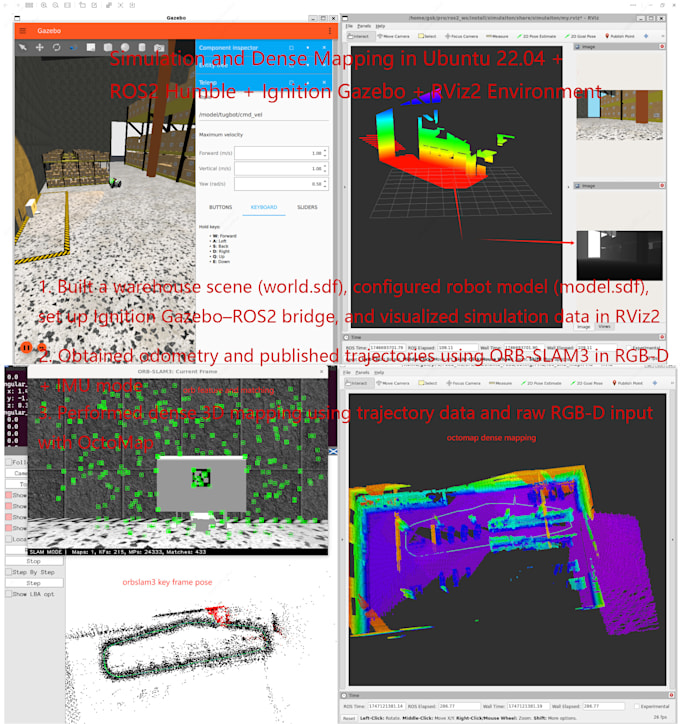
Offro sviluppo professionale in C++ per progetti di robotica e automazione, con competenze nell'implementazione di algoritmi, sviluppo di driver e test di simulazione. Che tu abbia bisogno di un piccolo nodo ROS2, di un'interfaccia Qt o di un sistema SLAM completo con simulazione Gazebo, posso aiutarti a creare soluzioni efficienti, modulari e pronte per la produzione. Sono qui per supportare le tue idee, semplici o complesse, con codice pulito e affidabile.
Ciò che offro:
Perché scegliermi:
Prima di ordinare:
Contattami prima per discutere l'ambito del progetto, i tempi e le aspettative. Questo assicura che siamo completamente allineati prima di iniziare.
Lingue
Traduzione automatica.
Traduzione automatica.
Offrite revisioni dopo la consegna?
Sì. Offro una revisione gratuita entro i limiti del progetto originale. Se la richiesta di revisione include nuove funzionalità o supera i requisiti concordati, potrebbe essere applicato un costo aggiuntivo. Ti confermerò sempre prima di procedere con aggiornamenti fuori dal scope.
Cosa succede se il mio progetto è più complesso o richiede più tempo rispetto ai tempi di consegna indicati?
Per compiti complessi o supporto a lungo termine, potrei proporre un tempo di consegna più lungo. In questi casi, il prezzo potrebbe essere adeguato in base all'ambito e al tempo richiesto. Contattami prima così possiamo discutere il miglior piano per il tuo progetto.
Puoi gestire algoritmi personalizzati o sistemi robotici avanzati?
Assolutamente. Sono specializzato in implementazione di algoritmi in C++, integrazione ROS2, sviluppo SLAM e test di simulazione con Gazebo. Mi piace affrontare progetti tecnicamente sfidanti e consegnare codice modulare e ottimizzato per ricerca o produzione.
Di quali informazioni hai bisogno prima di iniziare il progetto?
Fornisci una descrizione chiara delle tue esigenze, inclusi obiettivi tecnici, strumenti preferiti (ad esempio Qt, ROS2, OpenGL), eventuali materiali di riferimento e risultati attesi. Più dettagli condividi fin da subito, più fluido sarà il processo di sviluppo.
Possiamo discutere del progetto prima di effettuare un ordine?
Sì, consiglio vivamente di contattarmi prima di ordinare, specialmente per compiti personalizzati o complessi. Questo aiuta ad allinearci su obiettivi, tempi e prezzi prima di iniziare.
Fornisci documentazione o commenti nel codice?
Sì, per la maggior parte dei pacchetti STANDARD e PREMIUM, includo codice ben strutturato con commenti inline e posso anche fornire documentazione tecnica di base su richiesta.
🔒 Il mio progetto e il mio codice saranno mantenuti riservati?
Assolutamente. Tratto tutti i progetti con la massima riservatezza. A meno che tu non richieda supporto continuo o aggiornamenti futuri, eliminerò definitivamente tutto il codice consegnato e i file correlati entro una settimana dalla consegna riuscita.