Sfoglia categorie
Esplora
Fiverr Pro
Italiano
$
USD
Soluzioni di AI, DeepStream e Robotics ottimizzate per i tuoi dispositivi edge
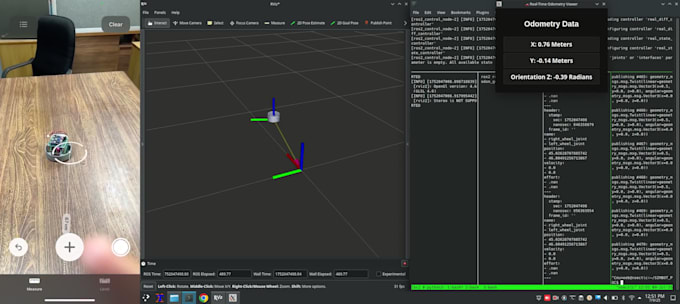
Se vuoi integrare l'AI all'edge per la tua applicazione robotica, sono specializzato nella creazione di soluzioni Edge AI accelerate dall'hardware usando ROS2, perfettamente adattate a sistemi robotici in tempo reale e a bassa latenza.
Come esperto di robotica e ROS2, ti aiuterò a distribuire applicazioni robotiche intelligenti direttamente su hardware di edge come Jetson Nano, Xavier, Raspberry Pi, Coral TPU e altri, consentendo inferenza offline, fusione di sensori e controllo in tempo reale usando modelli di AI avanzati.
Offro:
Tecnologie che utilizzo:
Ideale per:


Piattaforma:
NVIDIA Jetson
Sensori:
Accelerometro
•
Ultrasonic
•
Infrarossi
•
Camera
Traduzione automatica.
Q1: Che tipo di piattaforme hardware supporti?
A: Supporto una vasta gamma di dispositivi edge tra cui NVIDIA Jetson Nano/Xavier, Raspberry Pi 4, Intel NUC, Coral Dev Board e altre piattaforme ARM/x86.
Q2: Puoi distribuire modelli AI come YOLO o stima della posizione sui dispositivi edge?
A: Certamente! Posso ottimizzare e distribuire modelli come YOLOv5, YOLOv8, MoveNet e CNN personalizzate usando TensorRT, ONNX o TensorFlow Lite per inferenza efficiente sull'edge.
Q3: Integrerai il modello AI in un nodo ROS2?
A: Assolutamente. Creerò o modificherò nodi ROS2 per avvolgere il tuo modello AI, pubblicare i risultati dell'inferenza e integrarlo nel pipeline di controllo robotico.
Q4: Fornisci interfacce hardware come il controllo dei motori o la lettura dei sensori?
A: Sì, posso interfacciare il tuo hardware (ad esempio motori, telecamere, LIDAR, IMU, ecc.) con ROS2 usando driver personalizzati o standard.
Q5: Ho già un modello AI addestrato — puoi distribuirlo sul mio hardware?
A: Assolutamente! Condividi il file e il formato del modello, e io gestirò la conversione, l'ottimizzazione e l'integrazione con ROS2 per la distribuzione sull'edge.