Sfoglia categorie
Esplora
Fiverr Pro
Italiano
$
USD
Vincere il male con il bene è bene, resistere al male con il male è male
Livello 1
Ha soddisfatto determinati criteri di prestazione e mostra un forte potenziale nel marketplace.
ROS è ampiamente usato nell'industria robotica. Creare un pacchetto ROS è necessario per usare il tuo robot personalizzato.
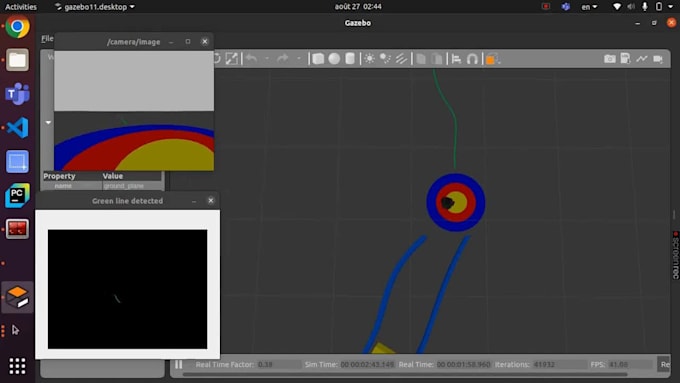
Qui, realizzerò un pacchetto ROS per il tuo robot che può essere un robot localizzato o manipolato. Userò il file URDF per modellare il robot e visualizzarlo su Gazebo.
Le specifiche del robot personalizzato sono richieste dall'acquirente.
Puoi considerare di avere un pacchetto ROS professionale con tutti i controller e i plugin di gazebo per laser scan, telecamera, controller delle articolazioni e anche una mappa per SLAM.
Realizzerò le tue simulazioni ROS, dalle simulazioni di base con Turtlesim fino a simulazioni avanzate.