Implementa una navigazione affidabile e autonoma sulla tua piattaforma mobile. Sono specializzato nella configurazione, messa a punto e debug dello ROS 2 Navigation Stack (Nav2) e delle pipeline SLAM per garantire una localizzazione robusta e una pianificazione del percorso fluida.
Ambito tecnico:
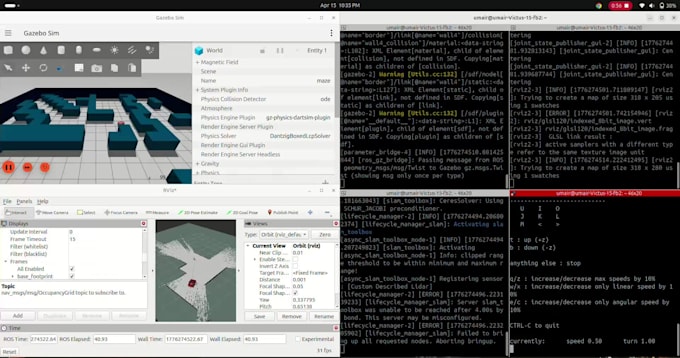
- Mapping & SLAM: Configurazione di SLAM Toolbox o Cartographer per la generazione di griglie di occupazione 2D ad alta risoluzione.
- Ottimizzazione della localizzazione: Ottimizzazione dei parametri di AMCL (Adaptive Monte Carlo Localization) per evitare dispersione e deriva dei particelle.
- Configurazione dei costmap: Messa a punto di costmap globali e locali, raggi di inflazione e livelli di ostacoli per evitare collisioni in sicurezza.
- Pianificazione del percorso & controllo: Regolazione dell'albero di comportamento insieme a configurazioni personalizzate per planner e controller (Dijkstra, DWA o TEB Local Planner).
Compatibile sia con setup ROS 2 Humble che Jazzy. Si prega di fornire i dettagli del tuo URDF o ambiente Gazebo prima di iniziare.