Sfoglia categorie
Esplora
Fiverr Pro
Italiano
$
USD
Ingegnere progettista Fabbricazione
Livello 2
Ha soddisfatto criteri di prestazioni elevate e ha una comprovata esperienza nel soddisfare le aspettative dei clienti.
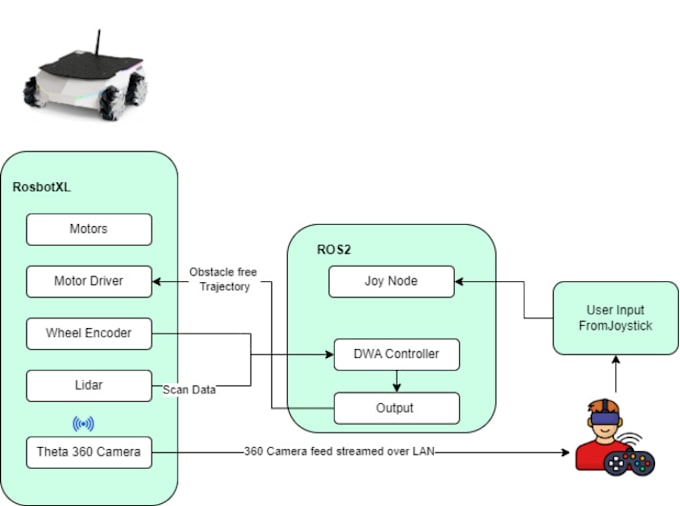
Stai costruendo un robot mobile o un sistema autonomo e hai bisogno di supporto esperto con ROS 2? Sei nel posto giusto! Mi specializzo nello sviluppo di progetti di robotica avanzata usando ROS 2, con un focus su:
Cosa offro:
Stack di navigazione (Nav2)
Hai bisogno che il tuo robot navighi autonomamente tra le mappe, eviti ostacoli o segua waypoint? Configurerò e regolerò l'intero stack Nav2, inclusa la mappatura, localizzazione, pianificazione del percorso e alberi di comportamento.
Cinematica del robot
Implementerò e convaliderò la cinematica forward e inverse per basi mobili differenziali, omnidirezionali o personalizzate.
Controller Python personalizzati
Da scrivere nodi ROS 2 in Python a creare controller personalizzati per la pianificazione del movimento o la fusione dei sensori, posso adattare soluzioni alle tue esigenze robotiche uniche.
Simulazione (Gazebo, RViz)
Testa il tuo robot in simulazione prima di passare al mondo reale. Supporto Gazebo/Ignition, RViz2 e altro ancora.
Costruiamo insieme il tuo robot!
Scrivimi prima di ordinare così posso capire le tue esigenze e offrirti la soluzione migliore.
Saluti,
Syed Huzaifa




Piattaforma:
Raspberry Pi
Sensori:
Accelerometro
•
Camera
•
Lidar
•
Posizione
Posizione
Expertise:
Microcontroller
•
IoT
•
ROS
•
AI
•
Programmazione